


自动驾驶汽车市场概况及行车泊车场景产品分析
tp钱包官网下载 2025年2月13日 15:14:28 tp钱包最新版下载 5

自动驾驶本质
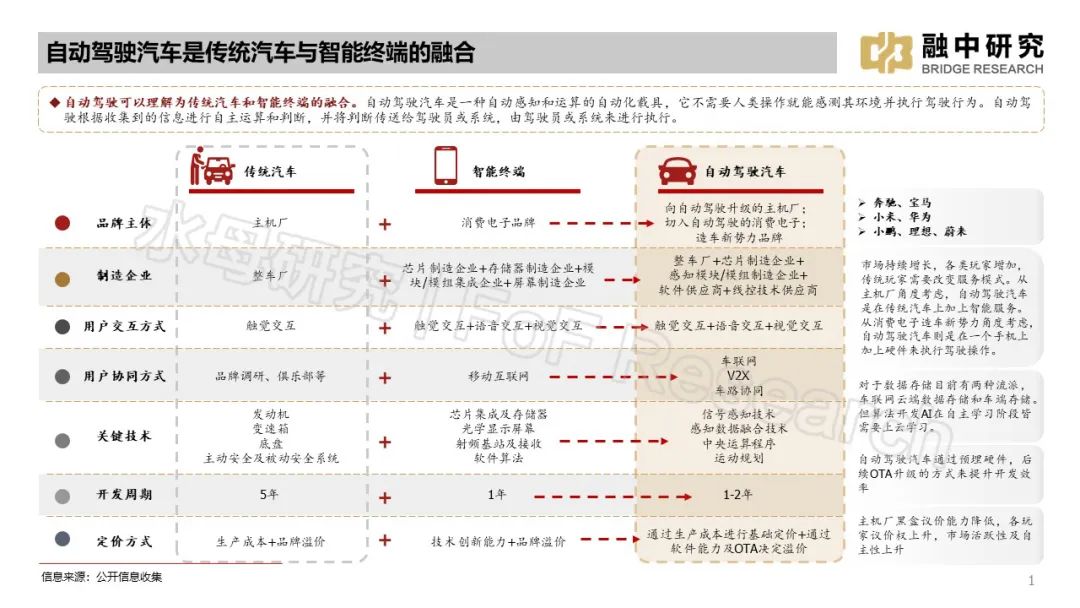
分析消费电子及新兴的汽车制造领域,自动驾驶汽车被视为智能设备与硬件的结合。随着自动驾驶技术的进步,车辆的自动化水平随之提升。以高级自动驾驶为例,驾驶过程中对驾驶员的操作需求极低,然而对车内传感器探测周围环境的能力却要求极高。

在不同自动驾驶的应用场景中,责任的划分各有不同。以L3级别的自动驾驶为例,驾驶员将监控环境的职责交给了传感器系统,同时,驾驶决策的任务也逐渐从驾驶员那里转移到了汽车系统,这无疑使得责任判断变得更加复杂。

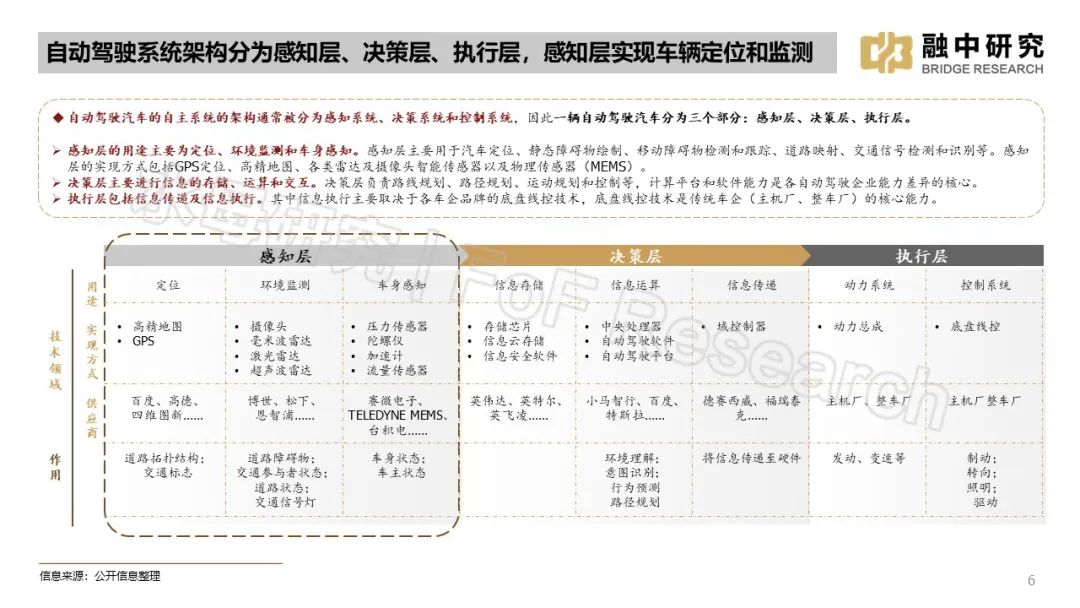
感知层实现方式
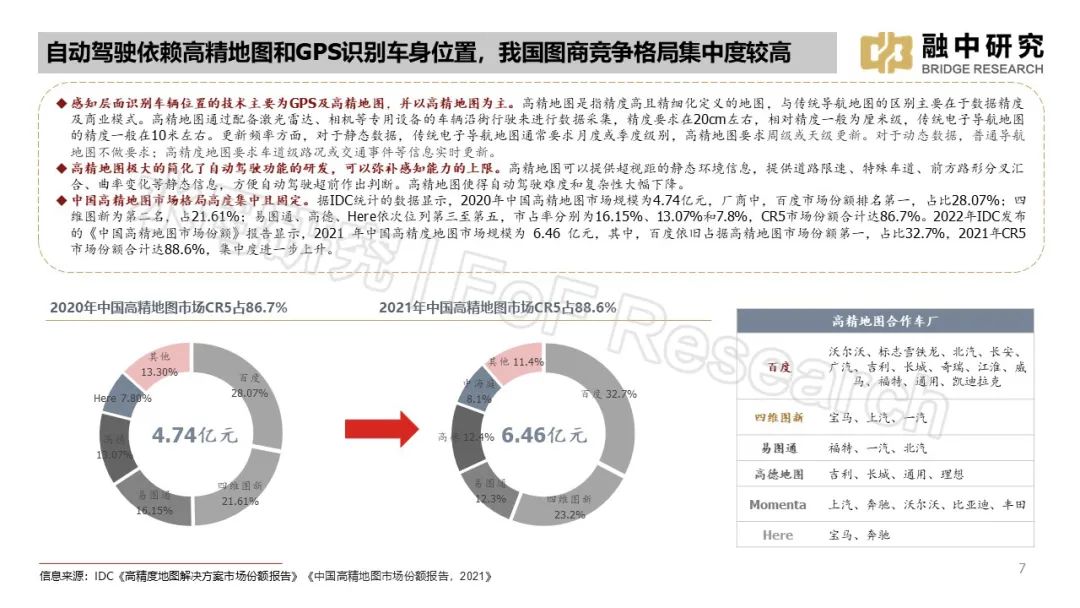
建立感知层依赖于多种技术手段。这些手段涵盖GPS定位、精确地图、多种雷达、摄像头、智能传感器以及微机电系统传感器。这些技术共同奠定了感知层的基础。其中,GPS定位和精确地图主要用于确定车辆的具体位置,而精确地图在定位过程中扮演着极其关键的角色。
高精地图操作简便,不过成本颇高。一般地图服务提供商的年费大概在700到800元,这比普通导航电子地图贵了20到35倍。对于汽车生产商而言,这笔额外的费用也是他们必须考虑的成本之一。
去高精地图化探索
面对地图缺失的困境,我们推出了“采用高精度地图”的技术策略。该技术通过传感器搜集的数据培育模拟信息,旨在逐步提升车辆对周边环境的辨识与决策水平。现阶段,由于传感器尚不能完全覆盖环境识别,汽车生产商正尝试将高精度地图与车内传感器融合,以便更精确地评估路况。
汽车制造商会根据路况的复杂程度,对两种感知技术给予不同程度的信任。当道路情况复杂且不确定因素多时,他们更信任高精度地图;而在熟悉的路段,他们更习惯于使用车内的感应设备。
高精地图绘制
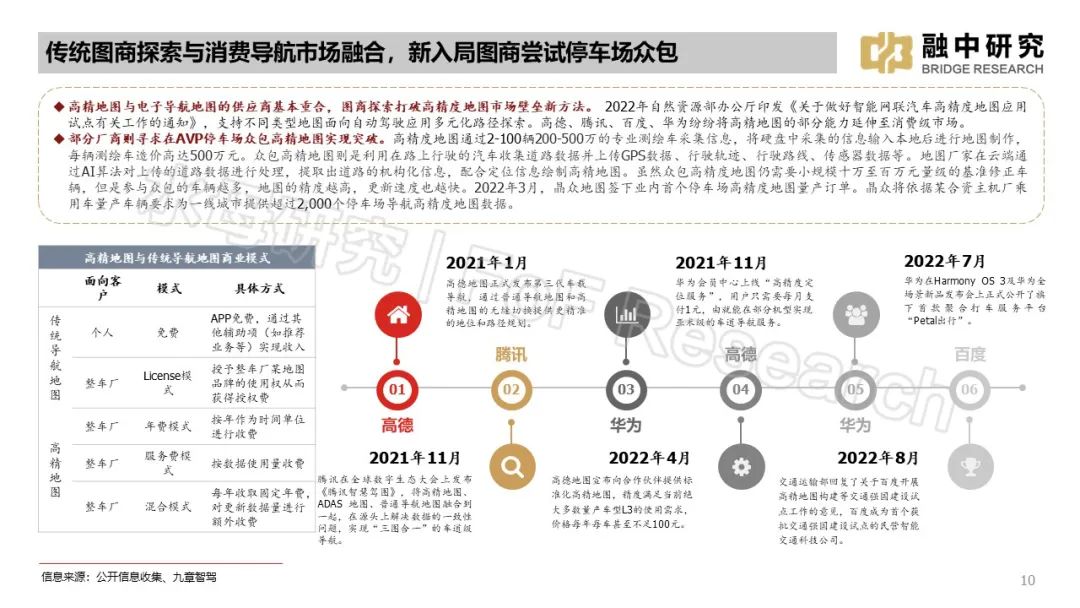
地图公司在云端运用人工智能技术对上传的道路数据进行分析。首先,他们提取道路的详细结构信息,然后结合定位数据绘制出精确的地图。此外,通过众包方式收集道路信息也较为常见。尽管这种方法需要投入一定数量的用于基准校正的车辆,费用大概在十万到百万之间,但参与众包的车辆越多,收集到的数据质量也就越高。

因此,地图的精度有所提升,更新频率也将增加。特别是在大城市,道路变化频繁,若高精度地图不能及时更新,便可能对自动驾驶车辆的导航精度产生不利。
传感器性能分析
毫米波雷达工作稳定,但在复杂环境中识别障碍和金属物体时表现不佳。此外,它只能提供二维数据,分辨率不高。特斯拉主要用摄像头来测距,但依靠自主研发的算法,通过视觉方式实现了这一功能,因为摄像头本身不具备直接测距的功能。

摄像头的安装位置各有不同,通常来说,车的前方和两侧会先装上感知用的摄像头,而周围和后方则主要用来成像。不过,随着自动驾驶技术的持续发展,这些摄像头可能会迎来升级。这样的转变也显示了摄像头在自动驾驶感知系统中的关键作用及其未来的发展方向。
传感器发展困境及车企关键难题
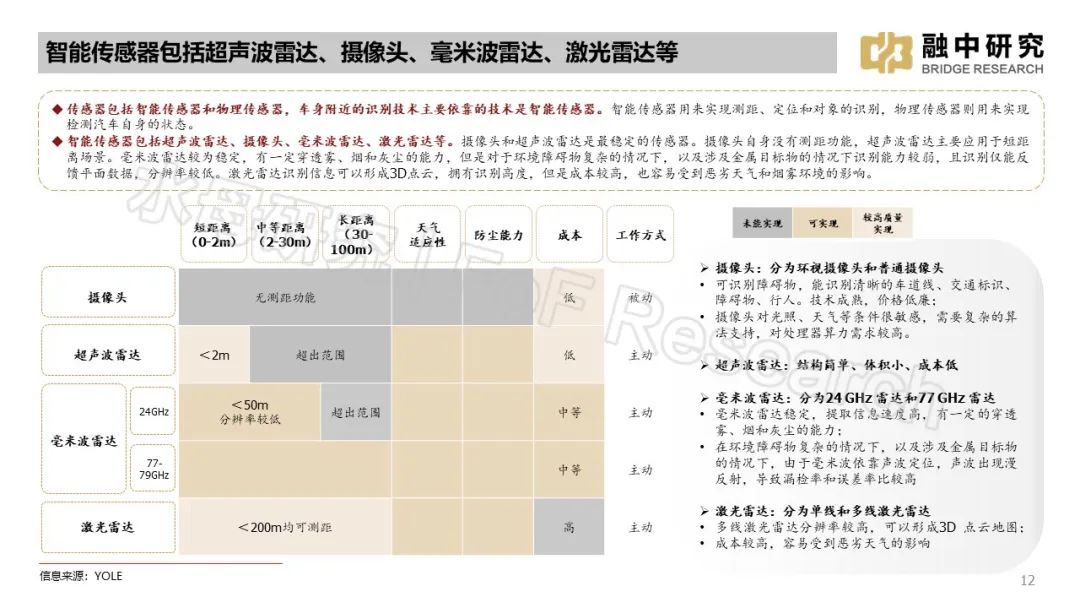
4D毫米波雷达试图取代激光雷达,但其在分辨率方面存在欠缺,并未满足汽车行业的标准要求。虽然具备三维识别能力,但在处理超远距离、隧道、车库等复杂环境时,其分辨率不尽如人意,且难以精确判断高度。

未来,激光雷达企业在汽车行业的技术实力和进展速度至关重要。然而,传感器性能有限,数据可能存在矛盾或重复,这还会影响芯片的计算能力。对汽车生产商来说,若要提高自动驾驶能力,关键是要提高芯片计算能力的运用效率,合理设置传感器的可靠性,并尽力减少信息丢失。
你对哪家汽车制造商能在自动驾驶领域率先攻克传感器与芯片性能难题感兴趣吗?如果这篇文章对你有所启发,请记得点赞并转发!

